多机协同规划方案
| 修订日期 | 修订版本 | 修订内容 | 修订人 |
|---|---|---|---|
| 2025.07.04 | V0.1 | 确定联动和同步的概念及场景需求 | 袁紫衣 |
| 2025.07.27 | V0.2 | 确定具体的实施方案 | 刘刚 |
[TOC]
本文档旨在说明如何在不同场景下使用ARAL算法库进行多机协同规划, 只讨论在同一个场景(Scene)下的规划方案。
本方案参考的接口文档
1. 联动与同步
联动 (Coordination): 指的是两个机器人在协同运动时,一个机器人的运动会引起另一个机器人的工具或者工件发生变化。例如,当一个工件被放置在旋转台上时,操作该工件的机器人需要根据旋转台的运动来调整自己的位姿。
- 当两个联动的机器人操作同一个工件,并有刚性约束时,至少需要一个机器人处于柔顺控制模式。
- 联动需要指定两个机器人的主从关系,在规划时,先确定主机器人的轨迹,然后解算从机器人的轨迹。
同步 (Synchronization): 指的是多个机器人在时序/时间/相位上需要保持一致,即运动在时空上有依赖关系。
2. 常见场景与实现方案
场景一: 不联动不同步
需求
- 两个机械臂同一个场景内独立执行任务,彼此之间没有运动关联。
实现方案:
- 为每个机器人创建一个独立的
Planner实例。 - 分别为每个
Planner添加运动指令(如tpAddPositionLine)。 - 为每个
Planner创建一个独立的Task实例来管理其生命周期。
- 为每个机器人创建一个独立的
示例代码:
// 为机器人A创建独立的规划器和任务调度器 auto planner_A_H = scene->rlCreateRobotPlanner({role_A}, "plan_A"); auto planner_A = scene->rlGetRobotPlanner(planner_A_H); auto task_A = scene->rlCreateRobotTask({planner_A_H}, "task_A"); auto planner_B_H = scene->rlCreateRobotPlanner({role_B}, "plan_B"); auto planner_B = scene->rlGetRobotPlanner(planner_B_H); auto task_B = scene->rlCreateRobotTask({planner_B_H}, "task_B"); // 两个规划器异步生成运动轨迹 planner_A->addMoveLine(target_A); planner_B->addMoveArc(via_B, target_B); // 两个任务调度器异步采样 task_A->tskUpdateCycle(cycle, point_A); task_B->tskUpdateCycle(cycle, point_B);
本文档中的示例代码是软件调用算法接口层的方式,不是用户层代码。
场景二: 联动不同步
- 需求:
- 机器人A(旋转变位机或者线性同步带)移动工件,机器人B需要控制工具在工件上移动,但它们的任务开始和结束时间不必同步。一般这种场景为轨迹跟踪,机器人B在工件上的速度需要考虑工艺要求。
实现方案:
- 规划机器人B的工具在工件坐标系下的运动轨迹
- 获取机器人A状态
- 将机器人B的任务轨迹(例如,焊接、喷涂)与机器人A的轨迹进行叠加
示例说明:
- 机器人B的任务是规划一个正方形轨迹。在每个规划周期,将正方形轨迹上的点与同一时刻机器人A的位姿进行叠加,得到最终的目标点,然后下发给机器人。
在ARAL中,这通常通过轨迹叠加(trajectory superposition)来实现。通常在软件层面通过周期性地更新目标点位来实现。也可以在算法层实现:
// 具体分两种情况:
// 1)机器人A独立规划,机器人B联动
// 2) 机器人A由外部控制, 机器人B联动
if(Independent){ // 为机器人A创建独立规划器
auto planner_A_H = scene->rlCreateRobotPlanner({state_A, SLAVE}, "plan_A");
auto planner_A = scene->rlGetRobotPlanner(planner_A_H);
}
// 为机器人B创建联动规划器(规划机器人B的工具在工件坐标系下的运动轨迹)
if(Independent)
auto planner_B_H = scene->rlCreateRobotPlanner({ {state_A, SLAVE}, {state_B, MASTER} }, "plan_B", );
else
auto planner_B_H = scene->rlCreateRobotPlanner({ {state_A, REFERENCE}, {state_B, MASTER} }, "plan_B", );
auto planner_B = scene->rlGetRobotPlanner(planner_B_H);
//创建联动任务管理器
if(Independent)
auto task_coord_H = scene->rlCreateRobotTask({planner_A_H, planner_B_H}, "task_B");
else
auto task_coord_H = scene->rlCreateRobotTask({planner_B_H}, "task_B");
// 两个规划器生成联动轨迹
if(Independent)
planner_A->addMoveLine(target_A);
planner_B->addMoveArc(via_B, target_B);
// 两个规划器被同一个任务模块调度
if(Independent)
task_coord->tskUpdateCycle(cycle, {point_A, point_B});
else{
state_A->rsUpdateJointPVA(q, qd, qdd); // 如果机器人A由外部控制,则需要更新A的状态
task_coord->tskUpdateCycle(cycle, {point_B});
}
这种场景主要需要解决机器人B的运动约束问题,即需求获得机器人B的运动能力,机器人A的运动能力和工艺速度要求之间的平衡。
场景三: 同步不联动
- 需求
两个机器人协同完成一个任务,例如在一个工件上机器人A走直线,机器人B走圆弧(或者同时走moveJ, 运动过程中有碰撞风险),要求它们的运动同启同停(或相位同步)。
两个机械臂同一个场景内独立执行任务,因为碰撞风险或者任务依赖,在时序上需要同步。(可以参考场景一方案, 时序由软件层逻辑控制解决)
- 实现方案:
- 定义规划器: 创建两个
Planner实例,并传入两个机器人的State句柄。 - 统一任务管理: 创建一个
Task来统一调度这两个Planner。
- 定义规划器: 创建两个
在ARAL中,如果两个机器人同时走moveJ,则会将两个机器人整合成一个机器人进行整体规划; 如果走轨迹,要求时间同步,通常通过时间缩放(time scaling)来实现; 如果需要相位同步,则在协调控制模块实现(需要抽象现有的相位同步逻辑,对此类场景,叠加两层相位同步)。
示例说明:机器人A和机器人B在同一个工件上操作,A走一段直线,B走一段直线和一条圆弧,需要A和B同启同停,示例代码如下:
// 为机器人A/B创建独立的规划器 auto planner_A_H = scene->rlCreateRobotPlanner({role_A}, "plan_A"); auto planner_A = scene->rlGetRobotPlanner(planner_A_H); auto planner_B_H = scene->rlCreateRobotPlanner({role_B}, "plan_B"); auto planner_B = scene->rlGetRobotPlanner(planner_B_H); // 为机器人A/B创建同步任务模块调度 auto task_sync = scene->rlCreateRobotTask({planner_A_H, planner_B_H}, "task_sync"); // 两个规划器生成联动轨迹 task_sync->tskWaitSyncMove(); planner_A->addMoveLine(target_A); planner_B->addMoveLine(target_B); planner_B->addMoveArc(via_B, target_C); task_sync->tskSyncMoveOn(); // planner_A的一条指令和planner_B的两条指令同步 // 两个规划器被同一个任务模块调度 task_sync->tskUpdateCycle(cycle, {point_A, point_B});
场景四: 联动同步
需求:
在场景二的基础上,要求两个机器人的运动同时开始、同时结束。
两个机器人协同完成一个任务,例如共同搬运一个物体
机械臂安装在导轨上进行大范围作业(如喷涂),要求导轨和机械臂的运动同启同停。
以上三种需求可以具体分成两类情形
实现方案:
路径分解
应用层将整体的作业路径分解为机器人A和机器人B的运动轨迹
确定主从关系
按照场景三中的方式进行规划
- 示例说明:机器人A和机器人B共同搬运一个重物,运动分解后,A走一段直线,B也走一段直线,需要A和B同启同停,示例代码如下:
// 为机器人A/B创建独立的规划器
auto planner_A_H = scene->rlCreateRobotPlanner({role_A}, "plan_A");
auto planner_A = scene->rlGetRobotPlanner(planner_A_H);
auto planner_B_H = scene->rlCreateRobotPlanner({role_B}, "plan_B");
auto planner_B = scene->rlGetRobotPlanner(planner_B_H);
// 为机器人A/B创建同步任务模块调度
auto task_sync = scene->rlCreateRobotTask({planner_A_H, planner_B_H}, "task_sync");
// 两个规划器生成联动轨迹
task_sync->tskWaitSyncMove();
planner_A->addMoveLine(target_A);
planner_B->addMoveLine(target_B);
task_sync->tskSyncMoveOn(); // planner_A的一条指令和planner_B的两条指令同步
// 两个规划器被同一个任务模块调度
task_sync->tskUpdateCycle(cycle, {point_A, point_B});
//!!! 需要注意的是,因为A/B机器人操作同一个工具,存在联动,所以A/B至少有一个需要是柔顺控制模式
整体路径统一规划
- 只规划一个整体路径(工具在工件中的运动轨迹)
- 确定主从关系
- 创建一个
sync_planner实例,并将两个机器人的State句柄都传入进行统一规划 - 协同路径规划:
sync_planner内部会处理两个机器人的时间或者相位耦合。
示例说明:机器人A(导轨)和机器人B共同喷涂一个工件,只关心工具在工件坐标系下的轨迹(如走一段直线),需要A和B同启同停,示例代码如下:
// 为机器人A/B创建联动规划器(规划机器人B的工具在工件坐标系下的运动轨迹) auto planner_H = scene->rlCreateRobotPlanner({ {state_A, SLAVE}, {state_B, MASTER} }, "plan", ); auto planner = scene->rlGetRobotPlanner(planner_H); // 创建联动任务管理器 auto task_coord = scene->rlCreateRobotTask({planner}, "task"); // 规划器生成联动轨迹 planner->addMoveLine(target_B); // 两个规划器被同一个任务模块调度 task_coord->tskUpdateCycle(cycle, {point_A, point_B}); //!! 上面的例子同样适用于两个机器人协同搬运,如只规划主机器人的轨迹,从机器人同步移动即可
3. 场景示例说明
ABB Fanta Bin 挑战,应用场景如下:
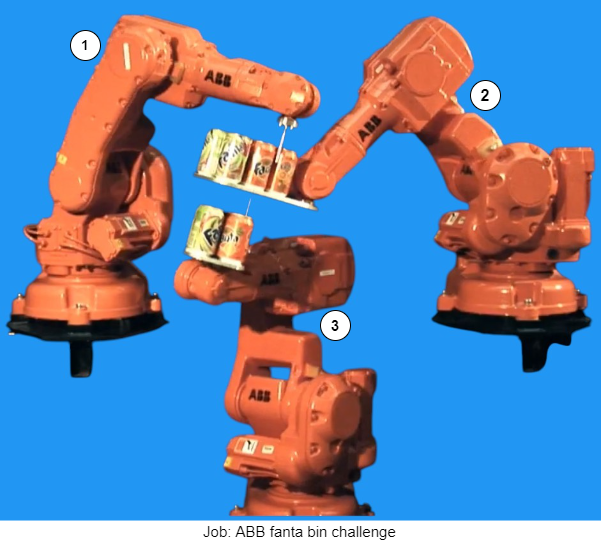
该场景包含3个子任务:
- 子任务1: 机器人2 进行独立运动,走确定性轨迹(如走圆弧)
- 子任务2: 机器人1的工具 在 机器人2 的末端托盘坐标系下走一个确定的轨迹(正常工具)
- 子任务3: 机器人3 控制它的末端托盘,使得机器人2的末端工具在机器人3的末端托盘坐标系下走确定的轨迹(外部工具)。
// 为机器人1/2/3创建对应的规划器
auto planner_2_H = scene->rlCreateRobotPlanner({state_2, MASTER}, "plan_2");
auto planner_2 = scene->rlGetRobotPlanner(planner_2_H);
auto planner_1_H = scene->rlCreateRobotPlanner({state_2, REFERENCE}, {state_1, MASTER}, "plan_1");
auto planner_1 = scene->rlGetRobotPlanner(planner_1_H);
auto planner_3_H = scene->rlCreateRobotPlanner({state_2, REFERENCE}, {state_3, MASTER}, "plan_3");
auto planner_3 = scene->rlGetRobotPlanner(planner_3_H);
// 为机器人1/2/3创建同步任务模块调度
auto task_sync = scene->rlCreateRobotTask({planner_1_H, planner_2_H, planner_3_H}, "task_sync");
// 3个规划器生成联动轨迹
task_sync->tskWaitSyncMove();
planner_2->addMoveLine(target_A);
planner_1->addMoveSpline(..., target_N);
planner_3->addMoveSpline(..., target_M);
task_sync->tskSyncMoveOn(); // planner_2/planner_1/planner_3的相关指令同步
// 两个规划器被同一个任务模块调度
task_sync->tskUpdateCycle(cycle, {point_1, point_2, point_3});
4. 总结
| 场景 | 核心机制 | ARAL 实现要点 |
|---|---|---|
| 不联动不同步 | 机器人独立规划、独立执行 | 每个机器人分别创建独立的Planner和Task。 |
| 联动不同步 | 运动学耦合 (主从/参考关系) | 创建一个包含多个RobotRole的Planner,将一个机器人的运动(从/主)耦合到另一个机器人的状态上。 |
| 同步不联动 | 时间耦合 (同启同停/相位同步) | 为每个机器人创建独立的Planner,但用同一个Task来统一调度。 |
| 联动且同步 | 运动学耦合 + 时间耦合 | 1. (推荐) 创建一个包含多个RobotRole的联动Planner,并由一个Task执行。2. 或者,将运动分解到多个独立 Planner(一般在应用层分解比较复杂),再用一个Task同步它们。 |